数据结构与算法 - 动态规划(线性动态规划)
转载说明
- 作者:力扣 (LeetCode)
- 链接:https://leetcode-cn.com/leetbook/read/dynamic-programming-1-plus/
- 来源:力扣(LeetCode)
- 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
这一章将会介绍线性动态规划的相关概念和经典问题,并给出一些练习题供大家演练。
用动态规划解决问题的过程有以下几个关键点:状态定义,状态的转移,初始化和边界条件。
状态定义 就是定义子问题,如何表示目标规模的问题和更小规模的问题。例如常见的方法:定义状态 dp[n],表示规模为 n 的问题的解,dp[n - 1] 就表示规模为 n - 1 的子问题的解。在实战中 dp[n] 的具体含义需要首先整理清楚再往下做。
状态转移 就是子问题之间的关系,例如定义好状态 dp[n],此时子问题是 dp[n-1] 等,并且大规模的问题的解依赖小规模问题的解,此时需要知道怎样通过小规模问题的解推出大规模问题的解。这一步就是列状态转移方程的过程。一般的状态转移方程可以写成如下形式
dp[n] = f(dp[i]) 其中 i < n按照状态定义和状态转移的常见形式,可以对动态规划进行分类,可以参考上一章的内容。
其中线性动态规划的主要特点是状态的推导是按照问题规模 i 从小到大依次推过去的,较大规模的问题的解依赖较小规模的问题的解。
这里问题规模为 i 的含义是考虑前 i 个元素 [0..i] 时问题的解。
线性动态规划简介
线性动态规划的主要特点是状态的推导是按照问题规模 i 从小到大依次推过去的,较大规模的问题的解依赖较小规模的问题的解。
这里问题规模为 i 的含义是考虑前 i 个元素 [0..i] 时问题的解。
状态定义:
dp[n] := [0..n] 上问题的解状态转移:
dp[n] = f(dp[n-1], ..., dp[0])从以上状态定义和状态转移可以看出,大规模问题的状态只与较小规模的问题有关,而问题规模完全用一个变量 i 表示,i 的大小表示了问题规模的大小,因此从小到大推 i 直至推到 n,就得到了大规模问题的解,这就是线性动态规划的过程。
按照问题的输入格式,线性动态规划解决的问题主要是单串,双串,矩阵上的问题,因为在单串,双串,矩阵上问题规模可以完全用位置表示,并且位置的大小就是问题规模的大小。因此从前往后推位置就相当于从小到大推问题规模。
线性动态规划是动态规划中最基本的一类。问题的形式、dp 状态和方程的设计、以及与其它算法的结合上面变化很多。按照 dp 方程中各个维度的含义,可以大致总结出几个主流的问题类型,见后面的小节。除此之外还有很多没有总结进来的变种问题,小众问题,和困难问题,这些问题的解法更多地需要结合自己的做题经验去积累,除此之外,常见的,主流的问题和解法都可以总结成下面的四个小类别。
单串
单串 dp[i] 线性动态规划最简单的一类问题,输入是一个串,状态一般定义为 dp[i] := 考虑 [0..i] 上,原问题的解,其中 i 位置的处理,根据不同的问题,主要有两种方式:
- 第一种是
i位置必须取,此时状态可以进一步描述为dp[i] := 考虑 [0..i]上,且取i,原问题的解; - 第二种是
i位置可以取可以不取
大部分的问题,对 i 位置的处理是第一种方式,例如力扣:
- 70 爬楼梯问题
- 801 使序列递增的最小交换次数
- 790 多米诺和托米诺平铺
- 746 使用最小花费爬楼梯
线性动态规划中单串 dp[i] 的问题,状态的推导方向以及推导公式如下:
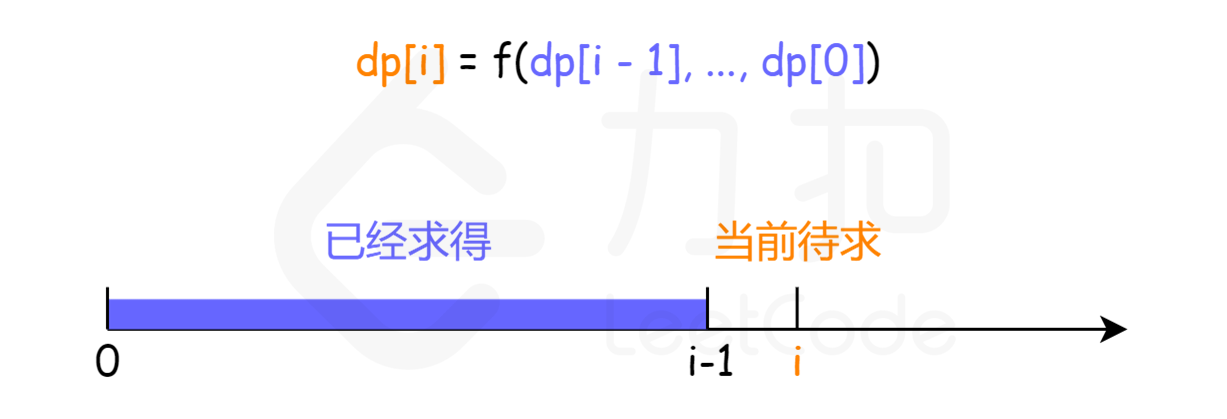
依赖比 i 小的 O(1) 个子问题
dp[n] 只与常数个小规模子问题有关,状态的推导过程 dp[i] = f(dp[i - 1], dp[i - 2], ...)。时间复杂度 O(n),空间复杂度 O(n) 可以优化为 O(1),例如上面提到的 70, 801, 790, 746 都属于这类。
如图所示,虽然绿色部分的 dp[i-1], dp[i-2], ..., dp[0] 均已经计算过,但计算橙色的当前状态时,仅用到 dp[i-1],这属于比 i 小的 O(1) 个子问题。
例如,当 f(dp[i-1], ...) = dp[i-1] + nums[i] 时,当前状态 dp[i] 仅与 dp[i-1] 有关。这个例子是一种数据结构前缀和的状态计算方式,关于前缀和的详细内容请参考下一章。
依赖比 i 小的 O(n) 个子问题
dp[n] 与此前的更小规模的所有子问题 dp[n - 1], dp[n - 2], ..., dp[1] 都可能有关系。
状态推导过程如下:
dp[i] = f(dp[i - 1], dp[i - 2], ..., dp[0])依然如图所示,计算橙色的当前状态 dp[i] 时,绿色的此前计算过的状态 dp[i-1], ..., dp[0] 均有可能用到,在计算 dp[i] 时需要将它们遍历一遍完成计算。
其中 f 常见的有 max/min,可能还会对 i-1,i-2,...,0 有一些筛选条件,但推导 dp[n] 时依然是 O(n) 级的子问题数量。
例如:
- 139 单词拆分
- 818 赛车
以 min 函数为例,这种形式的问题的代码常见写法如下
for i = 1, ..., n
for j = 1, ..., i-1
dp[i] = min(dp[i], f(dp[j])时间复杂度 \(O(n^{2})\),空间复杂度 O(n)
单串相关练习题
- 最经典单串 LIS 系列
- 最长递增子序列
- 最长递增子序列的个数
- 俄罗斯套娃信封问题
- 最大子数组和系列
- 最大子序和
- 乘积最大子数组
- 环形子数组的最大和 —— 环形数组的处理
- 面试题 17.24 最大子矩阵 —— 思路类似一维的最大子数组和
- 矩形区域不超过 K 的最大数值和 —— 在上一题基础上加了一个 K
- 打家劫舍系列
- 打家劫舍
- 打家劫舍 II
- 删除与获得点数
- 3n 块披萨
- 变形:需要两个位置的情况
- 最长的斐波那契子序列的长度
- 最长等差数列
- 与其它算法配合
- 形成字符串的最短路径 —— DP + 二分,贪心
- 最大整除子集 —— 先对数组排序
- 其它单串 dp[i] 问题
- 最长有效括号
- 等差数列划分
- 解码方法
- 分割回文串 II
- 比特位计数
- 使序列递增的最小交换次数
- 最低加油次数
- 两个字符串的删除操作
带维度单串
单串的问题,子问题仅与位置 i 有关时,就形成单串 dp[i] 的问题。在此基础上,如果子问题还与某种指标 k 有关,k 的物理意义比较常见的有长度,个数,次数,颜色等,则是另一大类问题,状态通常写成 dp[i][k]。其中 k 上可能有二分,贪心等算法.
当 i 变小时,形成小规模子问题,当 k 变小时,也形成小规模子问题,因此推导 dp[i][k] 时,i 和 k 两个维度分别是一个独立的单串 dp[i] 问题。推导 k 时,k 可能与 k - 1,...,1 中的所有小规模问题有关,也可能只与其中常数个有关,参考单串 dp[i] 问题中的两种情况。
例如 256. 粉刷房子 ,其中 k 这一维度的物理意义是颜色推导 k 时,k 与 k - 1,...,1 中的所有小规模问题有关,则 k 这一维度的时间复杂度为 \(O(K^{2})\)
单串 dp[i][k] 的问题,推导状态时可以先枚举 k,再枚举 i,对于固定的 k,求 dp[i][k] 相当于就是在求一个单串 dp[i] 的问题,但是计算 dp[i][k] 时可能会需要 k-1 时的状态。具体的转移需要根据题目条件确定。参考 813。
矩阵上的 dp[i][j] 这类问题中也有可能会多出 k 这个维度,状态的定义就是 dp[i][j][k],例如
- 576 出界的路径数
- 688 “马” 在棋盘上的概率
带维度经典问题
以下将涉及到的知识点对应的典型问题进行讲解,题目和解法具有代表性,可以从一个问题推广到一类问题。
==【813. 最大平均值和的分组】==
我们将给定的数组 A 分成 K 个相邻的非空子数组 ,我们的分数由每个子数组内的平均值的总和构成。计算我们所能得到的最大分数是多少。 注意我们必须使用 A 数组中的每一个数进行分组,并且分数不一定需要是整数。
输入是单串,但是有一个额外的次数的指标 k。在这种情况下,第一步是考虑单串 dp[i] 的子问题拆分方式:枚举子数组的起点来拆分子问题。
设计状态 dp[i] := [i..n-1] 上原问题的解,即 [i..n-1] 上分成 K 个相邻的非空子数组可得的最大分数
第二步是将额外的指标 K 作为一个维度加到状态里 dp[i][k] := [i..n-1] 上原问题的解,即 [i..n-1] 上分成 k 个相邻的非空子数组可得的最大分数
在推导状态时,先枚举 k,对于固定的 k,枚举 i ,枚举 i 时,相当于是在推导一个单串 dp[i] 的问题,但是计算 dp[i][k] 时需要用到 k-1 时的状态,这个区别在 2-1-4 中也有讨论。
由于 i 枚举的是起点,因此 i 越小的时候,子问题规模越大,需要从 n-1 到 0 枚举。
上面提到,固定 k 时,枚举 i ,相当于是在推导一个单串 dp[i] 的问题,这个问题在计算 i 的时候,需要此前已经计算的所有状态,即 i+1, i+2, ..., n-1。这相当于 2-1-1 中的第二种情况,但区别是这里有 k 这一个额外指标影响状态的推导。
对于区间 [i..n-1],若分出了区间 [i,j-1], 则在区间 [j..n-1] 上分 k - 1 个区间,就可以将 [i..n-1] 分成 k 个区间。而 [i+1, .., n-1] 均有可能是这个 j。因此枚举这些 j ,将 [j, n-1] 上分 k-1 份的结果 dp[j][k-1] 加上 [i..j-1] 上的平均追 avg(i, j-1) 就得到了当前待计算状态 dp[i][k]。
结合题目条件,这个单串 dp[i][k] 的问题,状态的推导方向,以及推导公式如下:
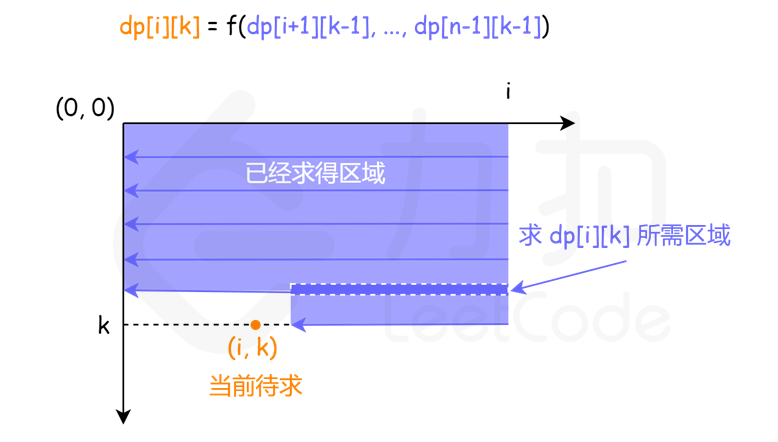
按照以上的分析,状态的转移方程可以写出来,如下:
\[ dp[i][k] = min_{j} dp[j][k-1] + avg(i, j-1)\ 其中 j 取 [i+1,..,n−1] 取较小值 \]
其中 \(avg(i, j)\),是求子串 (i, j) 上的平均值,其中中间的一步求 \(sum(i, j)\) 可以用前缀和实现。前缀和的内容参考下一章。
带维度单串相关练习题
- 带维度单串 dp[i][k]
- 最大平均值和的分组 —— k 是个数
- 鸡蛋掉落 —— k 是次数,k 上有二分
- 粉刷房子 —— k 是颜色
- 粉刷房子 II —— k 是颜色
- 奇偶跳 —— k 表示当前的奇偶状态
- 青蛙过河 —— k 表示上一步的跳的步数
- 安排邮筒 —— k 是个数,前缀和维护状态转移时的查询
- 抛掷硬币 —— k 是个数
- 分割数组的最大值 —— k 是份数
- 给房子涂色 III —— 有两个指标 k 颜色;t 街区数
- 股票系列
- 买卖股票的最佳时机
- 买卖股票的最佳时机 II
- 买卖股票的最佳时机 III
- 买卖股票的最佳时机 IV
- 最佳买卖股票时机含冷冻期
- 买卖股票的最佳时机含手续费
双串
有两个输入从串,长度分别为 m, n,此时子问题需要用 i, j 两个变量表示,分别代表第一个串和第二个串考虑的位置 dp[i][j]:= 第一串考虑 [0..i],第二串考虑 [0..j] 时,原问题的解
较大规模的子问题只与常数个较小规模的子问题有关,其中较小规模可能是 i 更小,或者是 j 更小,也可以是 i,j 同时变小。
其中一种最常见的状态转移形式:推导 dp[i][j] 时,dp[i][j] 仅与 dp[i-1][j], dp[i][j-1], dp[i-1][j-1],例如
- 72 编辑距离
- 712 两个字符串的最小 ASCII 删除和
线性动态规划中双串 dp[i][j] 的问题,状态的推导方向以及推导公式如下:
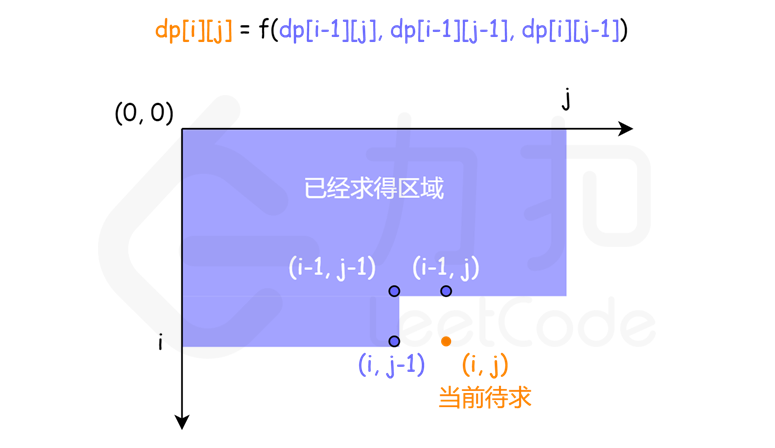
如图所示,绿色部分的 dp[i-1 ~ 0][j-1 ~ 0] 均已经计算过,但计算橙色的当前状态时,仅用到 dp[i-1][j], dp[i][j-1], dp[i-1][j-1],即比 i, j 小的 O(1)O(1) 个子问题。
这种形式的线性 DP 的代码常见写法
for i = 1..m
for j = 1..n
dp[i][j] = f(dp[i-1][j-1], dp[i-1][j], dp[i][j-1])时间复杂度 O(mn),空间复杂度 O(mn)
以上是 O(1) 转移的情况,即计算 dp[i][j] 时,虽然绿色部分的子问题均已经计算完,但只需要用到 dp[i-1][j], dp[i][j-1], dp[i-1][j-1]。也可能出现更高复杂度的转移,类似单串中依赖比 i 小的 O(n) 个子问题的况。
双串相关练习题
- 最经典双串 LCS 系列
- 最长公共子序列
- 两个字符串的最小 ASCII 删除和 —— LCS,len 和 ascii 各一个 dp
- 最长重复子数组 —— 最长公共子串,注意与最长公共子序列的区别
- 字符串匹配系列
- 编辑距离
- 通配符匹配
- 正则表达式匹配
- 其它双串 dp[i][j] 问题
- 交错字符串
- 不同的子序列
- 带维度双串 dp[i][j][k]
- 扰乱字符串
矩阵
输入是一个矩阵,宽和高分别为 m, n,用两个维度表示问题规模 dp[i][j]:= 第一维度考虑 [0..i], 第二维度考虑 [0..j],原问题的解
这样的状态定义,i 减小,j 减小均可以得到小规模子问题,两个维度均从小到大按顺序推,单独看各自维度,均是一个类似 上 的单串 dp[i] 问题,同样有单串中的两种情况,即转移时要考虑 O(1) 个小规模子问题,和转移时要考虑 O(n) 个子问题。
两个维度均只需考虑 O(1)O(1) 个子问题是最简单的情况,一般 dp[i][j] 就只与 dp[i-1][j], dp[i][j-1], dp[i-1][j-1] 有关,例如 64,但是也有可能出现需要其它位置的状态的情况,需要结合题目分析,这里分析的计算 dp[i][j] 需要哪些状态,决定了状态推导的方向。
线性动态规划中矩阵 dp[i][j] 的问题,状态的推导方向以及推导公式与双串 dp[i][j] 相同,但是物理意义不一样,且求 dp[i][j] 时所需的子问题的变化相对更多。
矩阵相关练习题
- 矩阵 dp[i][j]
- 三角形最小路径和
- 最小路径和
- 地下城游戏
- 下降路径最小和
- 最大正方形
- 下降路径最小和 II
- 矩阵 dp[i][j][k]
- 最大矩形
- 矩形区域不超过 K 的最大数值和 —— k 为宽度
- 最大子矩阵 —— 思路类似一维的最大子数组和
- 切披萨的方案数 —— 需要二维前缀和判断两个状态之间能否转移
线性动态规划总结
线性动态规划是动态规划中最基础的一类,它的状态一般物理意义很明确,易于分析。在初学动态规划时,通过线性动态规划的大量练习,可以不断加深动态规划的概念理解,例如动态规划中最重要的三个概念:最有子结构,重复子问题,无后效性。下面对动态规划的三个基本概念做个简要回顾,在线性动态规划的题目练习中可以不断地加深理解,之后再学习其它的动态规划类型就会容易很多。
最优子结构:如果问题的最优解所包含的子问题的解也是最优的,就称该问题具有最优子结构。 无后效性:即某阶段状态一旦确定,就不受这个状态以后决策的影响。也就是说,某状态以后的过程不会影响以前的状态,只与当前状态有关。 重复子问题:即子问题之间是不独立的,一个子问题在下一阶段决策中可能被多次使用到。(该性质并不是动态规划适用的必要条件,但是如果没有这条性质,动态规划算法同其他算法相比就不具备优势) 线性动态规划是动态规划中变化最多的一类。
首先线性动态规划针对的问题是最常见的数组,字符串,矩阵等,这三种数据结构本身就是线性的,因此出现这些类型的输入的时候,如果要用到动态规划,首先考虑线性动态规划就很合理了,因此很多问题不论最后正解是不是线性动态规划,都会首先想一下线性动态规划是否可行。
其次由于大部分问题的数据都是以这三种形式给出的,因此题目的变化会非常多,很多常见的输入形式以及问题都非常经典,都存在经典的状态设计。因此不考虑一些比较 Trick 的解法,仅仅是经典问题的经典状态设计,就比其它种类的动态规划问题多很多了。
例如单个数组或字符串上设计一维状态,两个数组或字符串上设计两维状态,以及矩阵上设计两维状态等等,同时以上三种情况的状态设计都有可能再加上额外的指标的状态,就是前面例题中的 k,这里面变化就很多了,比如有的题目在 k 这一维上要使用二分,贪心的策略,有的题目需要 DP 状态与数据结构配合来解决问题。
除此之外还有一类问题没有显式的数组,字符串,但是在求解的时候依然满足前面提到的动态规划三条基本概念,可以用动态规划求解,这种问题通常也是线性动态规划。如此多的变化仅仅本小节例举的题目是远远不够的,下一小节是线性动态规划的练习题,涉及到对线性动态规划的更多的变化。